
Alla fine ho disseminato questioni di base nei vari articoli e sto raccogliendo queste informazioni in questo stesso punto che sta diventando un po’ alla volta un micro Bignami di Fisica senza velleità di completezza, rimando ad una bibliografia degna di questo nome per eventali approfondimenti. Si tratta dei libri e delle dispense in cui ho studiato io.
Sommario
Piccola intro di Meccanica Analitica
Equazioni di Lagrange

La lagrangiana è una funzione inventata dal matematico italo-francese Giuseppe Luigi Lagrangia, naturalizzato francese con il nome di Joseph Louis Lagrange) nel XVIII secolo nell’ambito della disciplina denominata Meccanica Analitica, che è un ramo della Fisica Matematica nella quale la Meccanica di Newton viene formulata come una teoria matematica astratta.
Che senso ha astrarre una materia pratica come la meccanica?
La cosa ha senso qualora ci si imbatta nel desiderio di voler evitare di reinventare la ruota ogni volta che ci si presenta un problema leggermente diverso dal precedente e dover ogni volta ristudiarlo da capo ripercorrendo per il 90% la strada fatta in precedenza. Uno degli aspetti potenti della Matematica è la capacità di classificare i problemi e trovare strategie di soluzione comuni per intere classi di problemi. Astrarre vuol dire proprio questo: individuare caratteristiche comuni a problemi in apparenza diversi e arrivare alla soluzione con un unico strumento!
Quando alle superiori (al liceo, o all’itis) ci veniva dato un problema di meccanica (tipo: un rullo è libero di rotolare senza scivolare su un piano inclinato ecc.) non sapevamo ancora che esistessero due tipi di approccio per arrivare alle cosiddette equazioni del moto – delle equazioni differenziali che, una volta risolte, ci dicono come evolverà il sistema date certe condizioni iniziali (possiamo calcolare quanto ci mette il barile a rotolare fino in fondo per esempio).
Un approccio possibile è quello di cercare di scrivere direttamente l’equazione di Newton in base alle simmetrie e alle conformazioni del sistema:
F = ma = m \ddot{x}dove x è la posizione del baricentro del sistema per esempio. Per problemi semplici è sicuramente la via più diretta. Ma quando le cose si fanno complicate (orbita di un satellite attorno ad un corpo celeste, pendoli doppi, etc..), Lagrange ha dimostrato che si perviene alle stesse equazioni per questa via:
si calcola l’energia cinetica del sistema che è una funzione della velocità:
T = T(\dot{x})poi si calcola l’energia potenziale del sistema (se ad esempio siamo in un problema in cui c’entra la gravità, esiste il potenziale gravitazionale):
V = V(x)
che è funzione della posizione. Si definisce la funzione lagrangiana o, più in breve, lagrangiana:
L(x, \dot{x}) = T - Ve si dimostra che l’equazione differenziale
\frac{d}{dt}\frac{\partial L}{\partial \dot{x}}-\frac{\partial L}{\partial x} = 0è equivalente alla equazione di Newton che descrive il sistema. In sistemi molto complessi è molto più facile pervenire alle equazioni del moto attraverso la lagrangiana che non “a naso” cercando di costruire direttamente le equazioni di Newton.
Esempio
Prendiamo il semplice esempio del pendolo (a sua volta semplice o matematico, si chiama così perché è una idealizzazione dei pendoli reali: il filo non pesa, la massa è puntiforme):
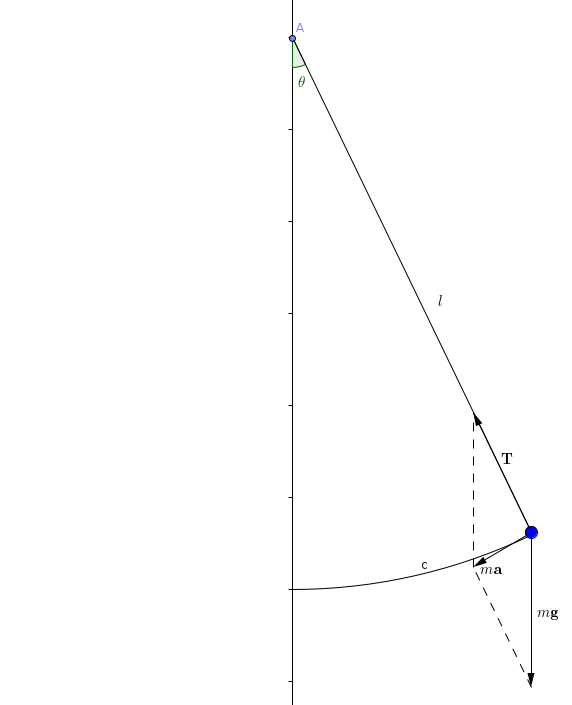
Strategia di Newton
Secondo la strategia di Newton dobbiamo scrivere in qualche sistema di coordinate l’equazione delle forze:
\mathbf{T} + m\mathbf{g} = m\mathbf{a}Qui il trucco è fare abbastanza esercizi per imparare a riconoscere il sistema di coordinate che ci può dare la forma più semplice di questa equazione.
Attenzione! Si possono ricavare molte forme di equazioni dallo stesso sistema, tutte equivalenti come insieme di soluzioni ma non tali dal punto di vista della velocità di soluzione.
Qui l’esperienza insegna che occorre adottare come sistema di riferimento quello radiale/trasverso (o, se volete, SDR polare) anziché per esempio proiettare l’equazione su due assi ortogonali x e y, il secondo dei quali per esempio coincidente con la verticale (SDR ortogonale cartesiano).
Nella direzione radiale (quella del filo) abbiamo due componenti la forza peso e la tensione del filo (che corrisponde ad un vincolo olonomo); la componente radiale del peso equilibra la tensione:
mg \cos \theta - T = 0
La seconda equazione la scriviamo proiettando la (1) in direzione trasversale (perpendicolare al filo):
0 + mg \sin \theta = ml\ddot{\theta}La prima equazione rappresenta il vincolo olonomo mentra dalla seconda ricaviamo l’equazione del moto:
\ddot{\theta}= -\frac{g}{l}\sin\thetaDài, non è stato difficile ma ci siamo imbattuti in due problematiche tipiche del metodo newtoniano: abbiamo a che fare con una forza (la tensione) che rappresenta un ulteriore incognta nel sistema e che sparisce per effetto del fatto che rappresenta un vincolo olonomo (espresso proprio da quell’equazione).
Stategia di Lagrange
Con il metodo lagrangiano non dobbiamo preoccuparci di come si dirigono e si compongono le forze, che vincoli abbiamo, non consideriamo reazioni vincolari che rappresentano ulteriori incognite… niente di tutto questo: dobbiamo solo calcolare energia cinetica:
T = \frac{1}{2}ml^2\dot{\theta}^2ed energia potenziale
V = mgl(1-\cos\theta)
Quindi la funzione lagrangiana per questo sistema è
L = T - V = \frac{1}{2}ml^2\dot{\theta}^2 - mgl (1 - \cos\theta)Infilando la lagrangiana dentro alla macchinetta (all’equazione di Lagrange) otteniamo:
\frac{d}{dt}\frac{\partial L}{\partial \dot{x}}-\frac{\partial L}{\partial x} = ml\ddot{\theta}+mgl\sin\theta = 0da cui
\ddot{\theta}= -\frac{g}{l}\sin\thetaVoi avrete sicuramente apprezzato quanto meno sbattimento c’è per arrivare alla stessa equazione. Il bello è che anche per sistemi molto più complessi il metodo lagrangiano vince in semplicità su quello di Newton.
Attenzione! non è finita: l ‘equazione va risolta, ma questa è un’altra faccenda.
Equazioni di Hamilton

Non pago dell’eleganza di Lagrange, William Rowan Hamilton (1805-1865) pervenne, nel 1833 (le cose più belle si fanno entro i 30 anni), ad una formulazione che abbassava di un ordine le equazioni differenziali introducendo una nuova funzione (hamiltoniana) che tecnicamente si ottiene dalla lagrangiana con una trasformazione di Legendre. Alle variabili di stato posizione – velocità (q, \dot{q}) si sotituiscono le variabili di fase ((p, q)) dove p = \partial L / \partial \dot{q} è il momento coniugato alla posizione q, se m è la massa del sistema. La funzione hamiltoniana è la seguente:
H(p,q,t) = p\dot{q} - L(q, \dot{q}, t)e, ancora una volta, si dimostra che queste equazioni del primo ordine (compare solo la derivata prima delle variabili), dette equazioni di Hamilton o equazioni canoniche:
\dot{p} = -\frac{\partial H}{\partial q}, \; \dot{q} = \frac{\partial H}{\partial p}sono a loro volta equivalenti all’equazione di Newton (del secondo ordine).
Piccola intro di Meccanica Quantistica – gli assiomi
Dopo quasi tre decenni di gestazione (grosso modo dal 1901 al 1927), la comunita dei fisici si è accordata su un set di assiomi della teoria quantistica che definisce la cosiddetta interpretazione di Copenhagen: questi che seguono sono i postulati, che riassumo brevemente.
Stato del sistema
Allo stato meccanico classico del sistema, cioè la coppia momento – posizione (p,q), è associato un vettore \psi in uno spazio di Hilbert (è uno spazio vettoriale di funzioni sufficientemente liscie). I vettori di questo spazio vengono detti funzioni d’onda. Quindi si parla indifferentemente di vettori o funzioni d’onda per significare lo stesso oggetto.
Ai fisici piace seguire la tradizonale notazione di Dirac che risulta eloquente e molto comoda quando si costruiscono le espressioni: anziché scrivere una funzione d’onda semplicemente come \psi, la scrivono così: |\psi\rangle. Questo simbolo si chiama ket, tra un po’ vediamo il perché.
Attenzione: lo stato può essere molto più vario di questo; per esempio lo stato può descrivere la polarizzazione di un fotone o lo spin di un elettrone, che sono analogamente a (posizione, velocità) altre due grandezze fisiche misurabili che definiscono lo stato del sistema.
Osservabile
Ad ogni quantità fisica misurabile (detta osservabile) è associato un operatore che agisce nello spazio di Hilbert degli stati. Si pensi ad un operatore dello spazio di Hilbert come ad una macchinetta che riceve in ingresso una funzione e ne sputa fuori un’altra appartenente allo stesso spazio. Ogni operatore ha un set finito di funzioni speciali (dette autovettori) che quando entrano nella macchinetta escono uguali a se stesse, eventualmente moltiplicate per un fattore di proporzionalità (complesso) \lambda. Questi fattori di proporzionalità complessi associati agli autovettori si chiamano autovalori dell’operatore. Quindi
\hat{a} \psi = \lambda \psiSempre a proposito delle tradizioni dei fisici, essi preferiscono non scrivere gli operatori così: \hat{a}, bensì così: \langle\hat{a}|. Questo simbolo si chiama bra.
Quindi quando applichiamo un operatore ad uno stato, scriviamo una bra-ket (bracket, parentesi)
\langle \hat{a}|\psi\rangle = \lambda |\psi\rangle
Il ruolo degli operatori è di rendere conto delle trasformazioni dello stato del sistema quantistico. Vuoi far compiere una trasformazione al tuo sistema quantistico? Applicagli un operatore. La cosa che più è indigesta è che questo operatore corrisponde (dobbiamo farci una mappa tra enti fisici e oggetti matematici) ad una specifica grandezza fisica e questo appare veramente come un colpo di magia. I fisici ebbero una lunga gestazione, ci vollero anni, per arrivare a questo: elaborarono dapprima la meccanica delle matrici (che trasformavano vettori) e poi approdarono al concetto più generale di operatore (che trasforma funzioni).
Equazione di Schrödinger
Come l’evoluzione di un sistema dinamico classico è determinato dalle soluzioni delle equazioni di Hamilton (una generalizzazione del tutto equivalente delle equazioni di Newton, vedi il paragrafo sopra), così l’evoluzione di una funzione d’onda è determinata dalle soluzioni dell’equazione di Schrödinger:
\hat{H} \psi (x,t) = E \psi (x,t) \textrm{ ovvero } \langle\hat{H}| \psi (x,t)\rangle = E | \psi (x,t)\rangle L’operatore \hat{H} si chiama operatore hamiltoniano, ma è solo uno dei tanti operatori possibili nella Mecccanica Quantistica.
Probabilità
Nella Meccanica Quantistica i valori delle grandezze che misuriamo sono di natura probabilistica. Sì, anche le grandezze classiche sono affette da errore e hanno natura probabilistica, ma si tratta di due cose completamente diverse: mentre le incertezze sulle misure classiche sono di tipo epistemico, in parole povere siamo ignoranti, ma migliorando lo strumento possiamo aggiungere cifre significative dopo la virgola; nel caso quantistico le incertezze sono di tipo ontologico, siamo ingoranti e non c’è alcun avanzamento tecnologico possibile che ci possa far emancipare da questo stato. È possibile solamente conoscere le probabilità a priori del risultato di una misura. La cosa ancora più sconvolgente è che prima di misurare non c’è alcun valore reale preesistente (Einstein non ci poteva credere: la luna non esiste quando non la osserviamo?): la Meccanica Quantistica è una teoria non reale. L’unico modo per portare il sistema nella realtà è effettuare una misura. Questo è senza dubbio lo scoglio concettuale più arduo da accettare, tanto che ci abbiamo messo 63 anni a metterci una pietra sopra, con il teorema di Bell (1964), 63 anni di baruffe tra i padri fondatori della teoria (Einstein e Bohr in primis).
La funzione d’onda è la portatrice delle probabilità a priori dei vari risultati, i fisici la chiamano anche ampiezza di probabilità, che è un concetto squistamente fisico (i matematici non lo contemplano). Il modo per estrarre la probabilità dalla funzione d’onda è calcolarne il modulo al quadrato. È questa l’interpretazione di Born della funzione d’onda.
Per esempio la densità di probabilità di trovare una particella in un dato punto è proporzionale al quadrato del modulo della funzione d’onda della particella in quel punto. Più in generale la probabilità che dopo una misura una funzione d’onda |\psi\rangle si trovi spalmata lungo uno degli autovettori |\psi_n\rangle è proporzionale al prodotto interno (al quadrato) della funzione per quell’autovettore:
P[\hat{a}\psi = \psi_n] = |\langle\hat{a}\psi|\psi_n\rangle|^2.
Questo funzionamento presuppone un ulteriore assioma, detto del collasso della funzione d’onda (vedi avanti). Per esempio se |\psi\rangle è lo stato di polarizzazione (sconosciuto a priori) di un fotone, applicando un polaroid (un operatore) troveremo che per esempio la probabilità a priori di trovarlo in direzione |H\rangle (orizzontale) oppure |V\rangle (verticale) sarà: P[\langle\hat{a}|\psi\rangle=|H\rangle] = 50\% = P[\langle\hat{a}|\psi\rangle=|V\rangle]
Collasso
Se (a_1, \ldots, a_n) è l’insieme di autovalori dell’operatore \hat{a} associato alla grandezza fisica a, la misura di a si traduce nell’applicazione dell’operatore \hat{a} alla funzione d’onda \psi e il risultato è uno dei valori (a_1, \ldots, a_n). Matematicamente ciò equivale al fatto che, come conseguenza della misura, la funzione d’onda si allinei con uno degli autostati dell’operatore \hat{a}, che è detto collasso della funzione d’onda. Collasso perché prima della misura la funzione d’onda è la combinazione lineare degli n autovettori – una possibilità infinita di stati, e dopo la misura si ritrova a coincidere con uno degli autovalori dell’operatore.
Questo excursus rapido e incompleto dei principi della Meccanica Quantistica ha solo lo scopo di orientare il lettore alla corretta interpretazione dei termini usati nei vari post, non ha alcuna pretesa di completezza (di correttezza sì, se ho scritto inesattezze mi corrigerete (cit)).
Mi riservo di riportare altri bignami all’occorrenza.
Bibliografia
- Giancarlo Benettin, Appunti di Meccanica razionale (A.A. 1990-91)
- Vladimir Arnold, Metodi Matematici della Meccanica Classica, Ed. Riuniti, 1990
- Gianfranco Nalesso, Struttura della Materia, Libreria Progetto, 1991
- Michel le Bellac, Quantum Physics, Cambridge University Press 2012
- Cristopher Jerry, Peter Knight, Introduction to Quantum Optics, Cambridge University Press 2005
- Richard P. Feynman, La Fisica di Feynman, Masson 1988
Commenti recenti